



Компания «Gleechi» опубликовала VirtualGrasp, аппаратно-независимое программное решение для естественного взаимодействия с виртуальными объектами при помощи «невооружённых» рук. Авторы предлагают улучшать им ВР-приложения.
VirtualGrasp основан на более чем восьмилетних исследованиях, которые сначала затрагивали область робототехники — решали проблемы естественного подбора объектов манипуляторами. Постепенно, вслед за массовым интересом к виару, проект превратился в комплекс для разработчиков виртуальной реальности.
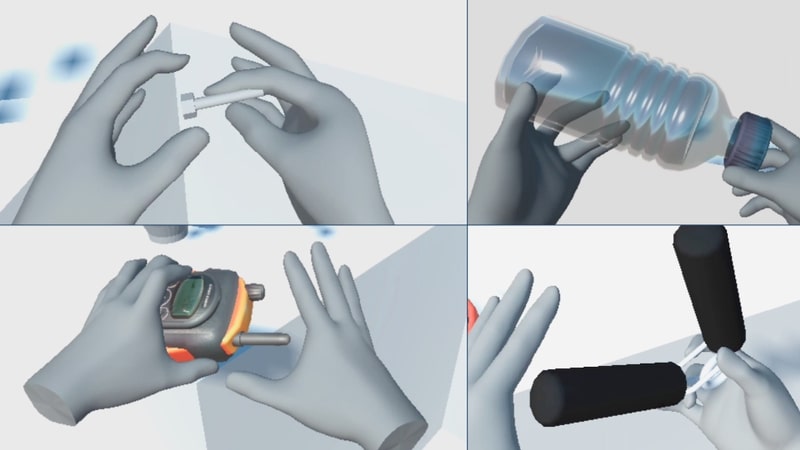
VirtualGrasp использует облачный анализ данных для понимания объектов, способов их захвата и использования. Компания обещает экономить разработчикам многие часы ручной работы при создании естественно выглядящих захватов и толчков одной и двумя руками, благодаря возможности их добавления путём простого перетаскивания из заготовок. Для достижения целевого эффекта объекты придётся запекать.

По сравнению с аппаратными решениями, которые пытаются обеспечить естественность с помощью более точных устройств трекинга пальцев, VirtualGrasp использует иной подход — понимание формы объектов и возможностей рук по взаимодействию с ними. Gleechi говорит, что это, с одной стороны, даёт более естественные позы рук, а с другой, не ограничивает пользователей или разработчиков конкретными датчиками или контроллерами.
SDK работает с Unity и Unreal Engine в виде плагина. Среди поддерживаемых платформ Gleechi называет Oculus, Pico, Vive и Varjo.
SDK VirtualGrasp (SDK) уже доступен в рамках программы раннего доступа. Запросить его можно здесь. А документы по работе с инструментарием в открытом доступе лежат по этой ссылке.
Не пропускайте важнейшие новости о дополненной и виртуальной реальности — подписывайтесь на Голографику в Telegram, ВК, Twitter и Facebook!
Далее: Linux-очки Simula One: известны характеристики и цены












