


Дополненной реальности трудно дать полное определение. В одной из интерпретаций это размещение виртуального объекта в реальном мире с сохранением местоположения. Такой сценарий требует, чтобы устройства правильно и в постоянном режиме определяли своё положение в трёхмерном пространстве. С целью снизить количество проблем в тестировании дополненной реальности исследователи Швейцарской высшей технической школы Цюриха и Microsoft представили бенчмарк LaMAR, эталонный тест с упором на локализацию и картографирование.
Несмотря на значительный прогресс в области контекстуального рендеринга, разработчики часто руководствуются нереалистичными тестами, не отражающими реальные сценарии дополненной реальности. Эти тесты основаны на скромных наборах данных с низким разнообразием сцен, снятых со стационарных камер, и в них отсутствуют данные других датчиков — инерциальных схем, радиомодулей или времяпролётных камер. Кроме того, точность непосредственных измерений бывает недостаточна для удовлетворения требований допреальности.
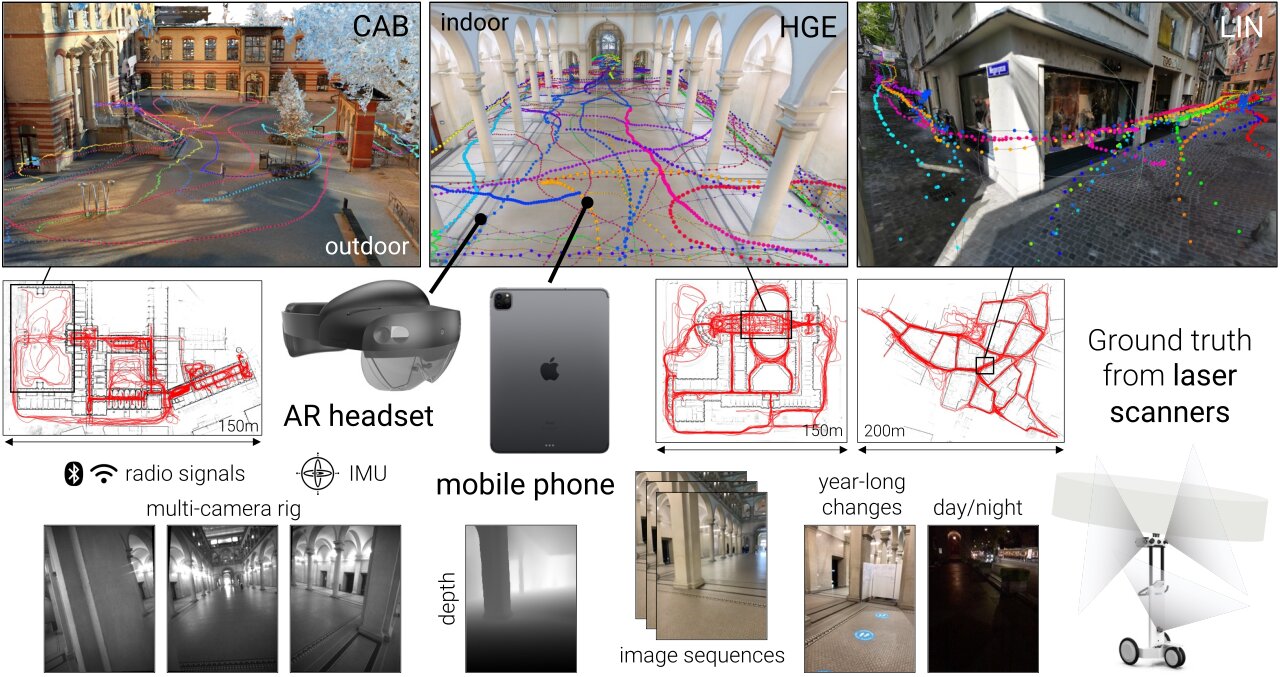
Чтобы закрыть этот пробел, группа учёных ETH Zurich и Microsoft создала LaMAR (Localization and Mapping for AR), новый эталонный тест с комплексным конвейером захвата и объективных, доказуемых данных, который совместно регистрирует реалистичные траектории и потоки с датчиков, записанные разнородными устройствами в сценах разного масштаба.
В итоге учёные опубликовали эталонный набор данных для разнообразных и крупномасштабных сцен, записанных с помощью нательных и ручных устройств дополненной реальности. Решение, по признанию авторов проекта, не абсолютно новое, но расширяющее несколько современных методов настройки программного обеспечения.
Среди сцен есть историческое здание, многоэтажное офисное здание и часть центра города. Данные собраны внутри помещений и снаружи, с разным освещением и семантическими изменениями, а также динамическими объектами. Среди устройств сбора заявлены iPad и HoloLens, а его длительность составила один год.
Конвейер автоматически создаёт точные траектории на основе лазерных сканирований. Он может обрабатывать краудсорсинговые данные с разнородных устройств, что позволяет расширить набор дополнительной информацией и различными типами оборудования.
Наконец, авторы представили подробную оценку методов локализации и картографирования для дополненной реальности и предложили идеи для будущих исследований.
Статью с результатами работы можно посмотреть в PDF. Код доступен здесь, а описание от авторов — на веб-странице проекта.
Не пропускайте важнейшие новости о дополненной и виртуальной реальности — подписывайтесь на Голографику в Telegram, ВК и Twitter! Поддержите проект на Boosty.
Далее: Unity слилась с ironSource — в интересах монетизации
