



Петербургская компания Dioram хочет коммерциализировать наработки в области автоматизации калибровки камер компьютерного зрения и детектирования проблем с сенсорами. Она приглашает принять участие в интервью, по результатам серии которых упакует продукт под потребности покупателей.
Dioram разрабатывает проекты на основе компьютерного зрения для рынков дополненной и виртуальой реальности, видеоаналитики, автономного транспорта и роботов. В её портфолио есть полностью российский алгоритм локализации и картографирования (simultaneous localization and mapping, SLAM), который можно применять для шестиосевого трекинга в устройствах виртуальной и дополненной реальности.
В компании рассказали Голографике, что столкнулись со спросом на сервисы для калибровки камер во время разработки индивидуальных решений для российских заказчиков. Имея опыт и технологии, Dioram решила рассмотреть их вывод на открытый рынок. С этой целью она просит работающих с такими технологиями людей принять участие в интервью в рамках исследования потребностей и спроса от потенцитальных клиентов.
Продукт под рабочим названием Calibration Toolbox — это профессиональный пакет инструментов для автоматизации и снижения стоимости калибровок камер компьютерного зрения.
Пользователи, по словам Dioram, сталкиваются с высокой трудоёмкостью ручной калибровки, необходимостью привлечения дорогих специалистов, наличием скрытых проблем с синхронизацией данных от сенсоров, которые трудно обнаружить и дорого исправлять после финализации оборудования.
Среди функциональных модулей Calibration Toolbox запланированы:
- Помощник и автоматизатор калибровок для камер и IMU
- Детектор аномалий и синхронизации данных от сенсоров
- Модуль автоподбора внутренних параметров камер
- Автоматизированная система калибровок внутренних и внешних параметров
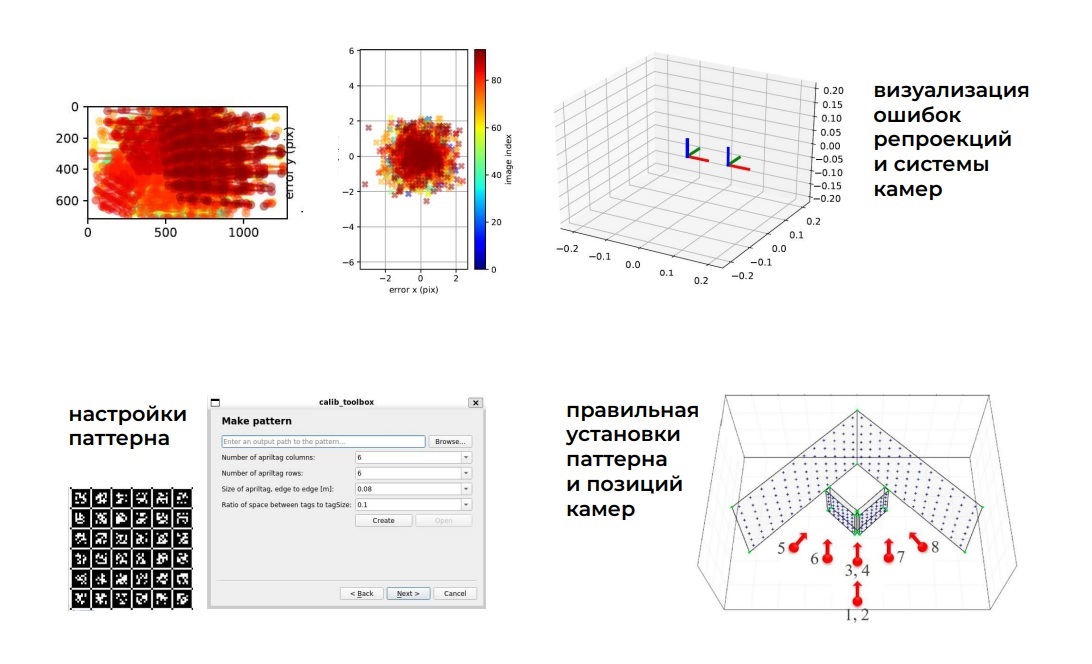
Помощник автоматизирует и ускоряет калибровку, минимизирует ошибки в процессе калибровки, позволяет масштабировать процесс на большом количестве датчиков. В нём есть подсказки, работа с паттернами, поддержка ROS/ROS2, визуализация процесса и результата, калибровка camera-to-camera и camera-to-IMU, поддержка мультикамерных систем.
Детектор основан на собственном SLAM-алгоритме компании SLAM One, проверяет согласованность данных от камер и других сенсоров (GNSS, лидары, IMU и так далее), информирует о проблемах с синхронизацией и сбоях, показывает артефакты и проблемные участки данных на временной шкале.
Автоподбор параметров работает в реальном времени и базируется на подходе Single-View Minimal Solver, оптимизирует внутренние параметры, такие как фокусное расстояние и центральная точка дисторсии.
В основу системы калибровок параметров тоже лёг SLAM One. Автоматизация здесь позволяет не проводить тщательную подготовительную работу, экономя ресурсы.
Готовность первых частей проекта запланирована до конца первого квартала 2023 года. Для участия в интервью Dioram просит писать на hello@dioram.ai.
Не пропускайте важнейшие новости о дополненной и виртуальной реальности — подписывайтесь на Голографику в Telegram, ВК и Twitter! Поддержите проект на Boosty.
Далее: VividQ и Dispelix анонсировали массовое производство голографических варифокальных волноводов
