

Группа бельгийских учёных разработала кортикальный интерфейс «мозг-компьютер» для помощи парализованным пациентам в управлении инвалидными колясками, протезами и другими устройствами. В экспериментальной части им удалось объединить нейронные сигналы из трёх двигательных областей мозга макаки с системой виртуальной реальности, достигнув управления скоростью в реальном времени без необходимости в видимых движениях или повторном обучении.
Традиционные исследования внутрикортикальных интерфейсов «мозг-компьютер» в основном ограничиваются лабораторными экспериментами с кликами курсором и захватом предметов роботизированными манипуляторами. Сценарии просты, а размеры ограничены, что затрудняет работу с постоянно меняющимися препятствиями и траекториями в реальном мире.
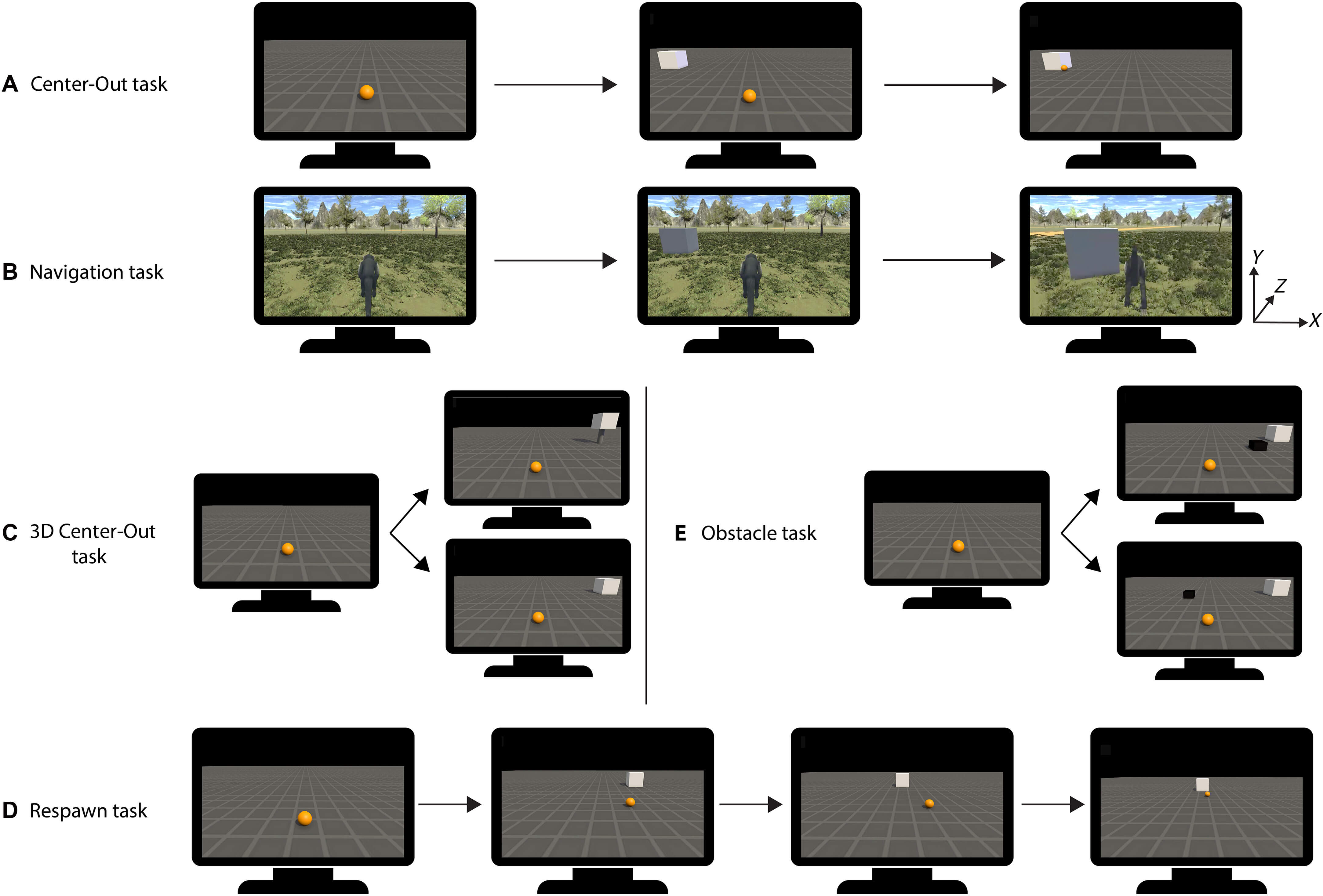
Для решения этой проблемы исследовательская группа предложила трёхмерный иммерсивный интерфейс, который позволил макакам управлять скоростью трёхмерной сферы или аватара в реальном времени и осуществлять непрерывную навигацию и избегание препятствий, физически пассивно наблюдая за движением в виртуальной среде. Весь процесс не зависит от физических движений, и декодер не требует переобучения.
Ключевые преимущества предлагаемого решения описаны в трёх аспектах:
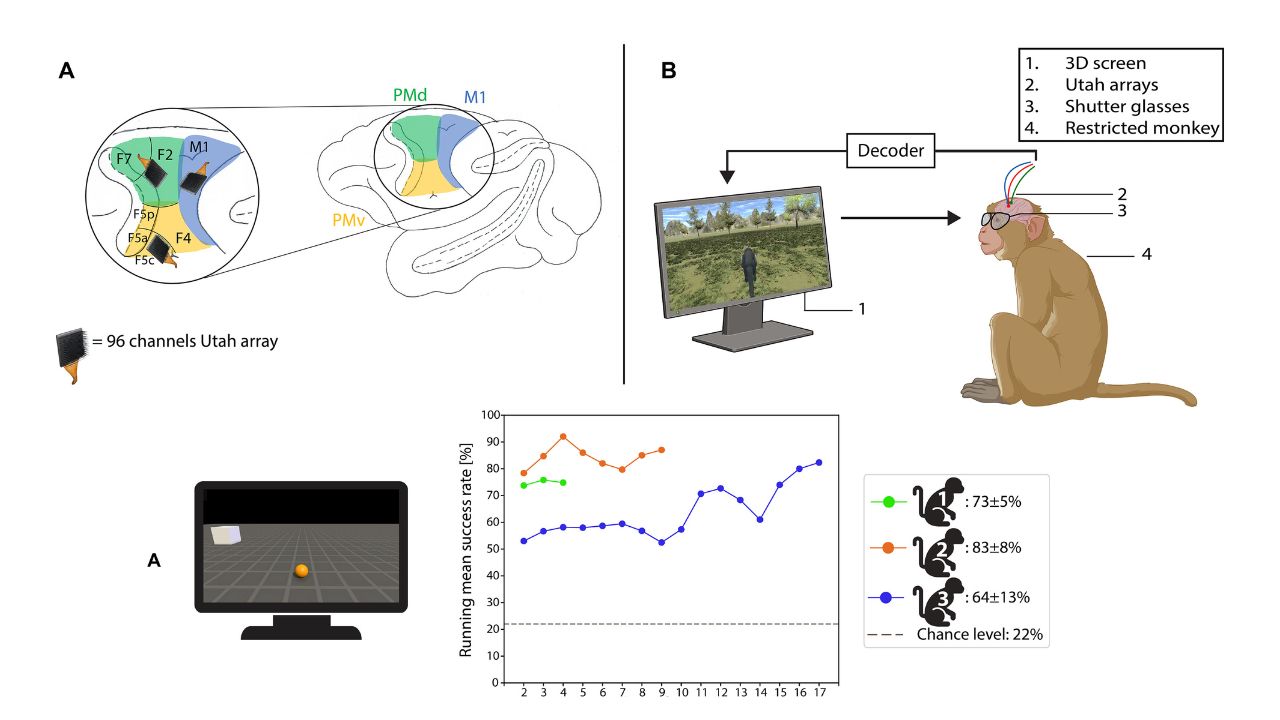
- Совместное декодирование сигналов из нескольких областей мозга: исследователи одновременно регистрировали нейронные сигналы из первичной моторной коры, дорсальной премоторной коры и вентральной премоторной коры макак-резусов. Эти три области работают вместе для планирования и выполнения движений, а совместное декодирование обеспечивает более гибкое и точное управление скоростью в трёх измерениях.
- ВР-навигация: команда создала реалистичную 3D-среду, в которой макаки должны мысленно управлять сферой или аватаром, чтобы непрерывно двигаться и обходить препятствия в сложных условиях. Это в значительной степени имитирует реальные задачи навигации, связанные с инвалидными креслами или протезами.
- Отсутствие движений, отсутствие повторяющихся тренировок, опора на нейропластичность: все обучающие данные декодера поступают исключительно от макак, пассивно наблюдающих за движением в виртуальной среде без необходимости выполнения каких-либо явных действий. Параметры декодера остаются фиксированными, система полностью полагается на собственную нейропластичность пользователя для адаптации к различным средам, целям и препятствиям. Это означает, что в будущем парализованным пациентам не потребуется многократно калибровать оборудование или выполнять изнурительные тренировки.
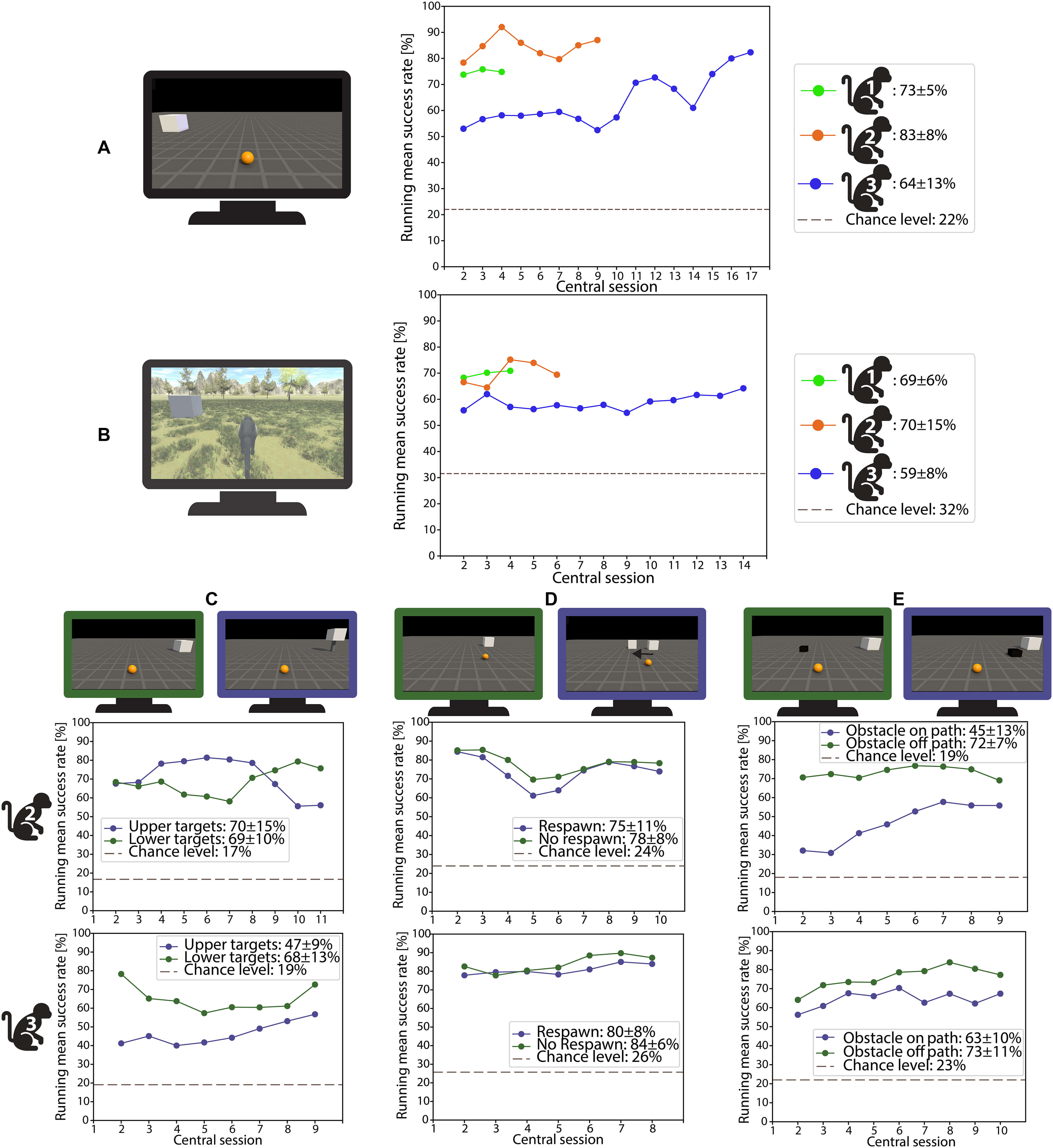
Исследовательская группа отметила, что одной из ключевых причин, по которой существующие интерфейсы «мозг-компьютер» трудно внедрять в реальных условиях, является то, что они полны непредсказуемых событий, требующих от мозга быстрой оперативной коррекции. Однако данный подход использует скоординированную активность премоторной и первичной моторной коры, естественным образом поддерживая эту гибкость. Экспериментальные результаты показали, что все три макаки успешно освоили трёхмерное управление скоростью и плавно переключались между различными задачами.
Технология после проверки на макаках пойдёт в клинические исследования. Для пациентов, парализованных вследствие травм спинного мозга или бокового амиотрофического склероза, такой интерфейс «пассивного наблюдения» может восстановить способность управлять инвалидными креслами, протезами и участвовать в социальном взаимодействии.
Не пропускайте важнейшие новости о дополненной и виртуальной реальности — подписывайтесь на Голографику в Telegram, ВК и Twitter! Поддержите проект на Boosty.
Далее: Учёные разработали способ передавать запахи в мозг с помощью ультразвука




